Tensor Body: Real-time Reconstruction of the Human Body and Avatar Synthesis from RGB-D
by Barmpoutis, Angelos
IEEE Transactions on Cybernetics, Special issue on Computer Vision for RGB-D Sensors: Kinect and Its Applications, vol. 43(5), October, 2013, pp. 1347-1356. https://doi.org/10.1109/TCYB.2013.2276430
IEEE Transactions on Cybernetics, Special issue on Computer Vision for RGB-D Sensors: Kinect and Its Applications, vol. 43(5), October, 2013, pp. 1347-1356. https://doi.org/10.1109/TCYB.2013.2276430
Description
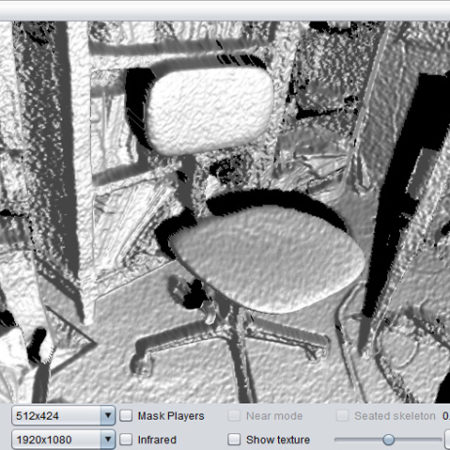
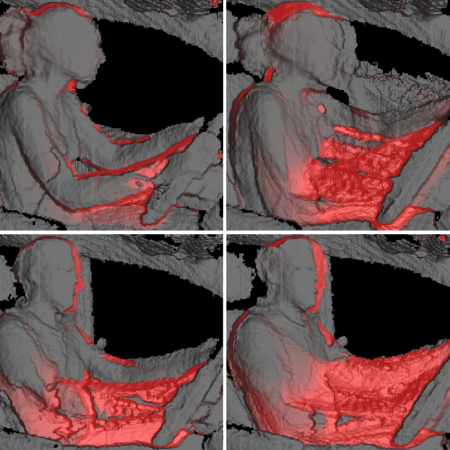
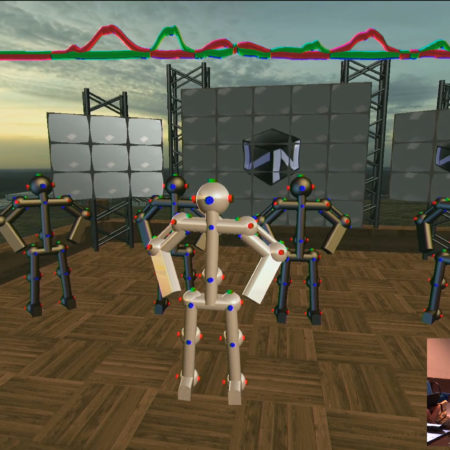
Real-time 3D reconstruction of the human body has many applications in anthropometry, telecommunications, gaming, fashion, and other areas of human-computer interaction. In this paper a novel framework is presented for reconstructing the 3D model of the human body from a sequence of RGBD frames. The reconstruction is performed in real time while the human subject moves arbitrarily in front of the camera. The method employs a novel parameterization of cylindrical-type objects using Cartesian tensor and b-spline bases along the radial and longitudinal dimension respectively. The proposed model, dubbed tensor body, is fitted to the input data using a multistep framework that involves segmentation of the different body regions, robust filtering of the data via a dynamic histogram, and energy-based optimization with positive-definite constraints. A Riemannian metric on the space of positive-definite tensor splines is analytically defined and employed in this framework. The efficacy of the presented methods is demonstrated in several real-data experiments using the Microsoft Kinect sensor.
Additional information
| Author | Barmpoutis, Angelos |
|---|---|
| Journal | IEEE Transactions on Cybernetics, Special issue on Computer Vision for RGB-D Sensors: Kinect and Its Applications |
| Volume | 43 |
| Number | 5 |
| Month | October |
| Year | 2013 |
| Pages | 1347-1356 |
| DOI |
Citation
Citation
Barmpoutis, A., 2013. Tensor Body: Real-time Reconstruction of the Human Body and Avatar Synthesis from RGB-D. IEEE Transactions on Cybernetics, Special issue on Computer Vision for RGB-D Sensors: Kinect and Its Applications, vol. 43(5), pp. 1347-1356. https://doi.org/10.1109/TCYB.2013.2276430
BibTex
@article{digitalWorlds:146,
doi = {https://doi.org/10.1109/TCYB.2013.2276430},
author = {Barmpoutis, Angelos},
title = {Tensor Body: Real-time Reconstruction of the Human Body and Avatar Synthesis from RGB-D},
journal = {IEEE Transactions on Cybernetics, Special issue on Computer Vision for RGB-D Sensors: Kinect and Its Applications},
month = {October},
volume = {43},
number = {5},
year = {2013},
pages = {1347-1356}
}